Embedded RTOS Development
Deterministic, reliable real-time software for connected devices where timing is a constraint, not a target.
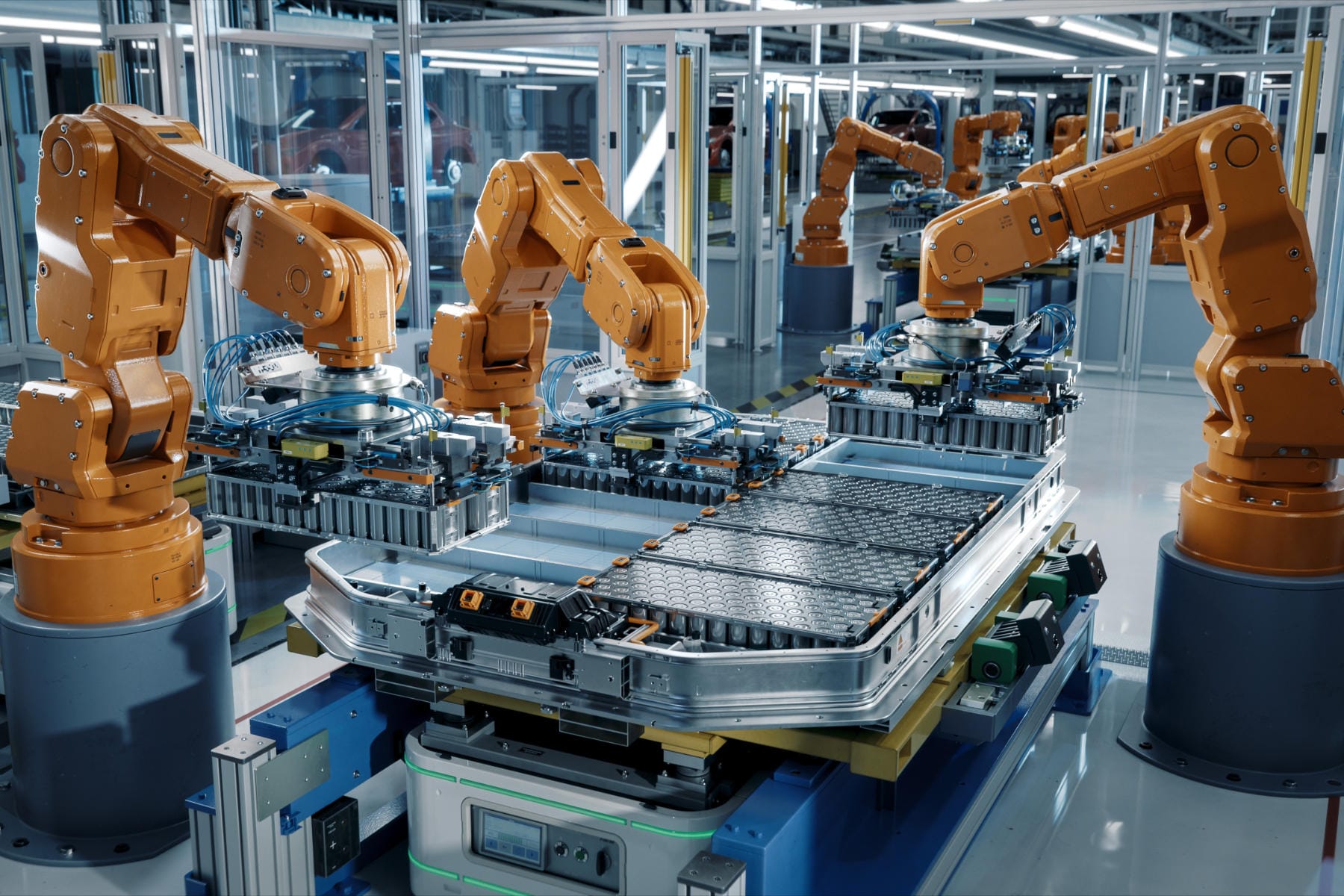
Consult Red develops embedded RTOS software for devices where response time, power efficiency, and reliability are non-negotiable. We work across the leading RTOS platforms (from FreeRTOS and Zephyr for connected IoT devices through to VxWorks for demanding industrial applications), and across the microcontroller, microprocessor, and DSP architectures that underpin them.
Our RTOS experience spans healthcare monitoring, industrial sensing, IoT connectivity, and consumer electronics, covering everything from initial platform selection through to driver development, connectivity integration, and hardware security implementation.
RTOS or Linux — getting the platform decision right
The most important embedded OS decision is also one of the earliest. Getting it wrong adds cost, complexity, and risk that compound through the rest of the programme.
An RTOS is the right choice when your device requires a guaranteed, deterministic response to inputs, with timing as critical as the response itself. Control systems, sensor processing, motor control, medical monitoring, and safety-critical applications typically require this level of determinism. An RTOS is also generally preferable for highly constrained devices where footprint, power consumption, and boot time are primary constraints.
Embedded Linux is better suited to devices that need complex networking, a rich driver ecosystem, broad UI capability, and a large application software stack. Many modern connected products use both an RTOS to manage time-critical hardware tasks and Linux to handle the application layer above it.
We have extensive experience with both platforms and will give you an honest view of the trade-offs before you commit to either.
RTOS platforms we work with
We have hands-on development and porting experience across the platforms used in production embedded programmes. As well as developing against established RTOS environments, we have ported RTOSs to new hardware platforms and extended them to support additional features and device drivers.
FreeRTOS
The most widely deployed open-source RTOS, particularly for microcontroller-based IoT devices. We have ported FreeRTOS to new hardware targets and extended it for specific application requirements — including adding a USB stack to support bespoke and standard intelligent device classes on a custom hardware platform.
Zephyr
The Linux Foundation’s open-source RTOS, increasingly the platform of choice for modern IoT and connected sensor applications requiring broad protocol support and strong security features.
Well-suited to devices targeting Matter, Thread, and BLE connectivity.
VxWorks
Wind River’s commercial RTOS for demanding real-time and safety-critical applications where long-term support, certification support, and deterministic performance are priorities.
μC/OS and pSOS+
Commercial RTOS platforms with long deployment histories in industrial and embedded consumer applications.
We maintain experience with these platforms for clients with existing products in the field requiring ongoing support.
![]()
![]()
Our embedded RTOS services

RTOS Selection and Architecture
Platform selection based on your device constraints, timing requirements, connectivity needs, and long-term support model. We evaluate the RTOS, toolchain, and hardware together – because real-time behaviour is determined by all three, not just the OS.
RTOS Porting
Porting an established RTOS to a new hardware platform, including BSP development, interrupt controller integration, timer configuration, and validation of timing behaviour on the target hardware.
Driver Development
Device driver development within the RTOS environment for custom peripherals, standard interfaces (USB, SPI, I2C, UART, CAN), and SoC-specific subsystems. We write drivers that meet the timing constraints of the RTOS scheduler.
Connectivity Stack Integration
Integration of networking and protocol stacks (including TCP/IP, LwM2M, MQTT, BLE, and Wi-Fi) within the RTOS environment, optimised for the memory and power constraints of the target device.
Hardware Security Integration
Implementation of hardware security features within the RTOS stack. We enable ARM MPU protection, hardware key stores for TLS mutual authentication, hardware roots of trust, and secure boot for RTOS-based devices. Security is addressed at the architecture stage, not added after.
Real-Time Tuning and Optimisation
Analysis and optimisation of interrupt prioritisation, pre-emption policies, scheduling configuration, and latency to meet timing requirements. For devices where a timing budget is tight, we instrument and validate performance against specification.
Safety-Critical Development Support
For applications requiring functional safety compliance, we provide development support including requirements traceability, code review, and test coverage analysis aligned to relevant standards.
Why work with Consult Red for embedded RTOS development
Hardware and software designed together
Real-time performance is determined by the hardware as much as the software.
Interrupt latency, cache behaviour, peripheral timing, and power management all influence whether a system meets its timing budget.
Our hardware design capability means we address these dependencies at the architecture stage – not as a debugging exercise after the hardware is locked.

Breadth across platforms and architectures
We have worked across microcontrollers, microprocessors, and DSPs on a range of RTOS platforms over more than 20 years.
That breadth means our platform recommendations are based on genuine comparative experience, not familiarity with a single environment.
When a new programme requires an RTOS we have not used before, our engineers have the foundational knowledge to work with it productively.
IoT connectivity and security depth
Modern RTOS programmes rarely involve bare-metal logic alone.
They require connectivity stacks, device management protocols, and security implementations that interact with the real-time core.
We bring expertise in LwM2M, MQTT, TLS, and hardware security integration that treats connectivity and security as first-class requirements alongside timing performance.
Frequently asked questions about embedded RTOS development
-
What is an RTOS?
A Real-Time Operating System (RTOS) is an operating system designed to process inputs and produce outputs within guaranteed, predictable time constraints.
Unlike general-purpose operating systems, an RTOS provides deterministic scheduling, prioritised interrupt handling, and task management designed to meet hard or soft timing deadlines.
It is the standard OS choice for control systems, sensor platforms, industrial devices, and other applications where the timing of a response is as critical as the response itself.
-
What is the difference between an RTOS and embedded Linux?
An RTOS provides deterministic, low-latency task scheduling suited to time-critical applications on constrained hardware.
Embedded Linux provides a richer software environment, with broader driver support, networking capability, and application frameworks, but without guaranteed real-time determinism in its standard form.
RTOS is typically used when footprint, power, and response time are the primary constraints. Linux is used when networking, UI, and application complexity are the primary requirements. Many products use both in combination.
-
What is FreeRTOS?
FreeRTOS is an open-source, MIT-licensed RTOS widely used in microcontroller-based connected devices.
It provides a minimal kernel with task scheduling, inter-task communication, and timer management, and is supported across a large range of microcontroller families.
It is particularly prevalent in IoT applications and is the basis for Amazon’s AWS IoT Device SDKs.
-
What is Zephyr RTOS?
Zephyr is an open-source RTOS hosted by the Linux Foundation, designed for connected IoT devices with strong security, connectivity, and power management requirements.
It supports a wide range of hardware architectures and connectivity protocols, including BLE, Thread, Matter, and Wi-Fi, and is increasingly the RTOS of choice for modern IoT product programmes requiring long-term open-source support.
-
How do you ensure real-time performance is met in a design?
Real-time performance is validated through a combination of analysis and measurement. At the architecture stage, we define timing budgets for critical tasks and validate that the hardware, RTOS configuration, and driver implementation can meet them.
During development, we use hardware instrumentation and RTOS trace tooling to measure actual interrupt latency, task execution times, and scheduling behaviour against the timing budget.
Where timing requirements are not met, we diagnose root causes across the hardware, driver, and RTOS configuration layers.
-
Can you port an RTOS to custom hardware?
Yes. RTOS porting involves developing the BSP components that connect the RTOS kernel to the target hardware, including interrupt controller configuration, system timer setup, memory map definition, and peripheral driver initialisation.
We have ported established RTOS platforms to new hardware targets and extended existing ports to support additional peripherals and connectivity.
Ready to discuss your embedded RTOS project?
Whether you are selecting a platform for a new design, porting an RTOS to custom hardware, or need specialist support on timing, security, or connectivity integration, we are ready to help.

Related Insights
Our thoughts, ideas and views as well as in-depth technical papers. Explore our insights, get to market faster and make your digital ambitions a reality.

Articles
Securing Personal Data on IOT Devices
Exploring the importance of securing personal data in IoT systems and principles that could help IoT developers and users keep data secure.

Articles
7 key mistakes businesses make when evolving their Industrial IoT device
In this article, we explore the common mistakes that can derail an Industrial IoT project before it delivers value.

Articles
The Hidden Costs of Choosing the Wrong Product Architecture
In this article, we explore the foundations that make connected product evolution possible and successful.